D3P-450-P3 Delta Robot
Taybetmendiya hilberê
Taybetî
1, Dema çerxa standard ji 0.4s kêmtir e, ji bo leza herî zêde û aborî bi lêgerîna we re hevdîtin pêk tîne.
2, Sêwirana pêşkeftî ya hevahenga Hooke di eksê zivirandinê de, dihêle robot bi hêsanî bi operasyona dubarekirî ya tundûtûjiyê ya bilind re mijûl bibe.
3, Robot delta ji bo hilberîna bilez a di pîşesaziya xwarin û derman de îdeal e.Bi berfirehî di komkirin, hilgirtin û hildan û cîhkirina robotên materyalên piçûk de tê bikar anîn.
Parametreyên Hilberê
| Awa | D3P-450-P3 | |
| Axes | 3+1 | |
| Payload | 3 kg | |
| Manîpulator | Pîvan | 41,5 kg |
| Çap | 450mm | |
| Repeatability | Rewş | 0.05mm |
| Rotation | 0.1° | |
| Max Speed | 400pp/min | |
| Range Rotation | ±360 | |
| Momenta herî zêde ya bêkêmasî ya destûrdar | 31 × 10-4kg .m2 | |
| Angle Range of Actuated Arm | Bi jorve | 36.5º |
| Jêr | 65.5º | |
| Navê min | Sê-qonaxa 380VAC -10%~+10%, 49~61HZ | |
| Kapasîteya hêzê | 3KVA | |
| Hêza Nirxkirî | 1.3 kw | |
| Germahiya Storage | -10℃~70℃ | |
| Jîngeha Xebatê | -10℃~50℃,RH≤80% | |
| Parastinî | IP55 | |
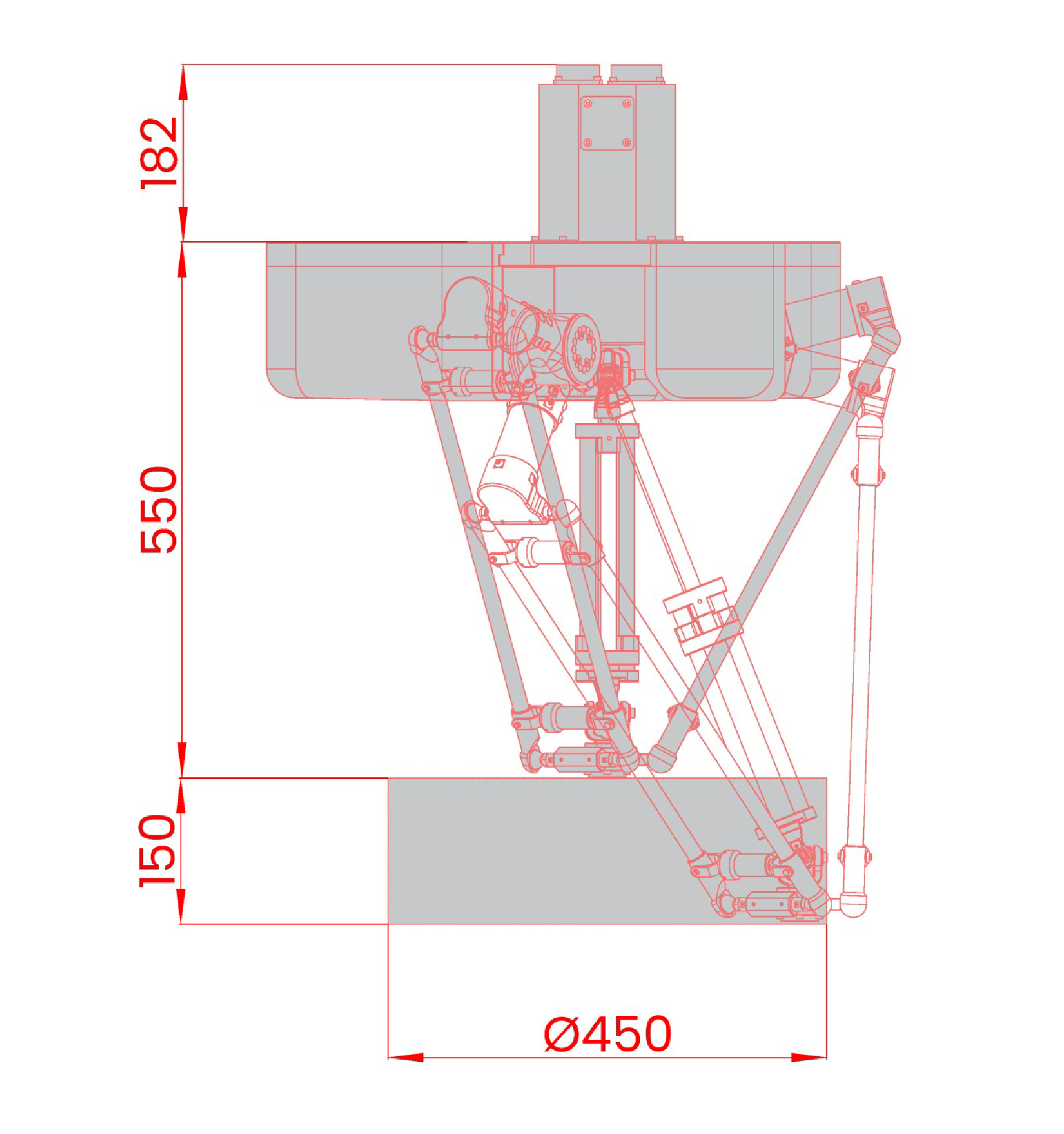
Drawing Product
01. Pîvan û Rêjeya Xebatê (mm)
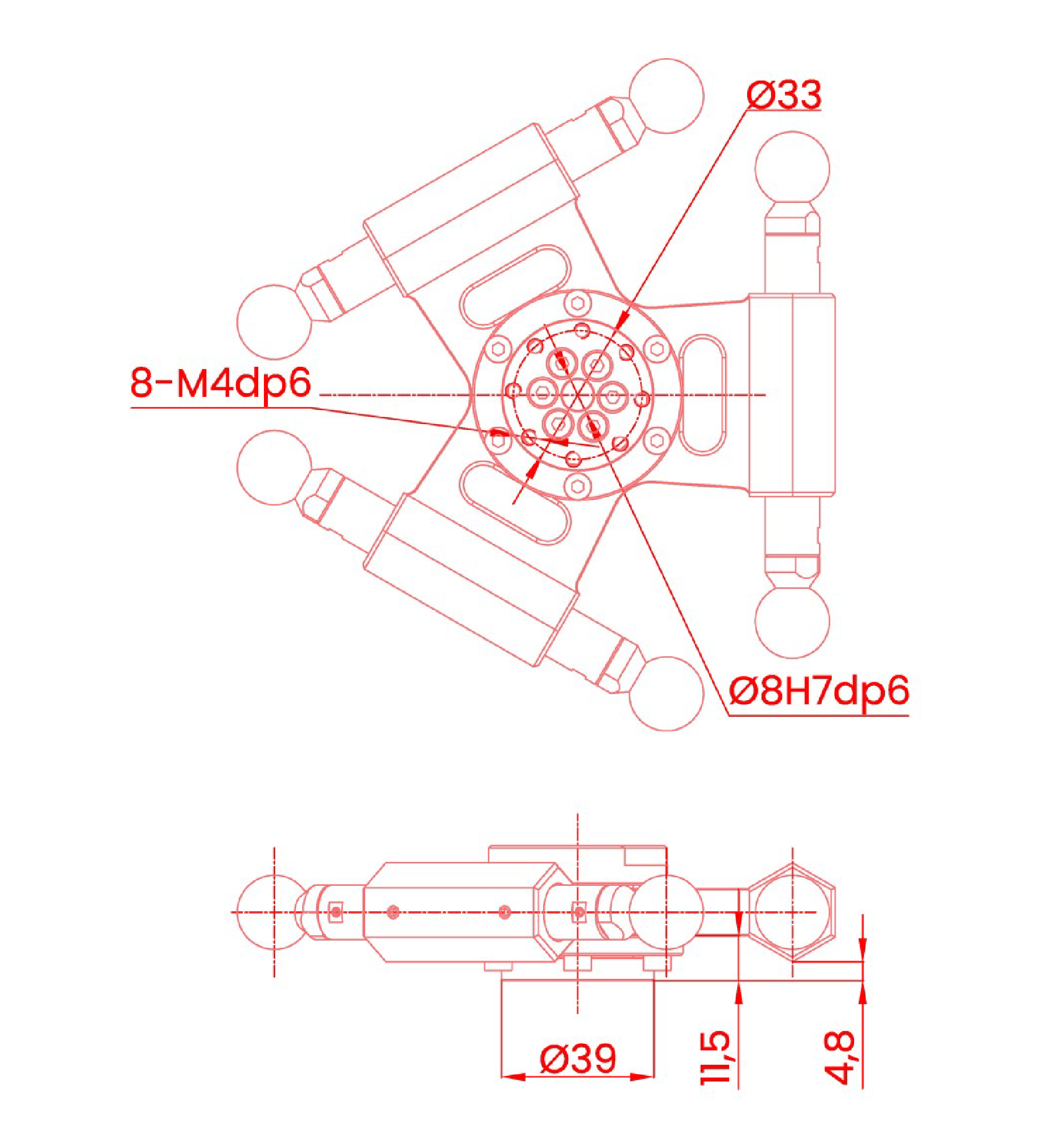
02. Flange (mm)
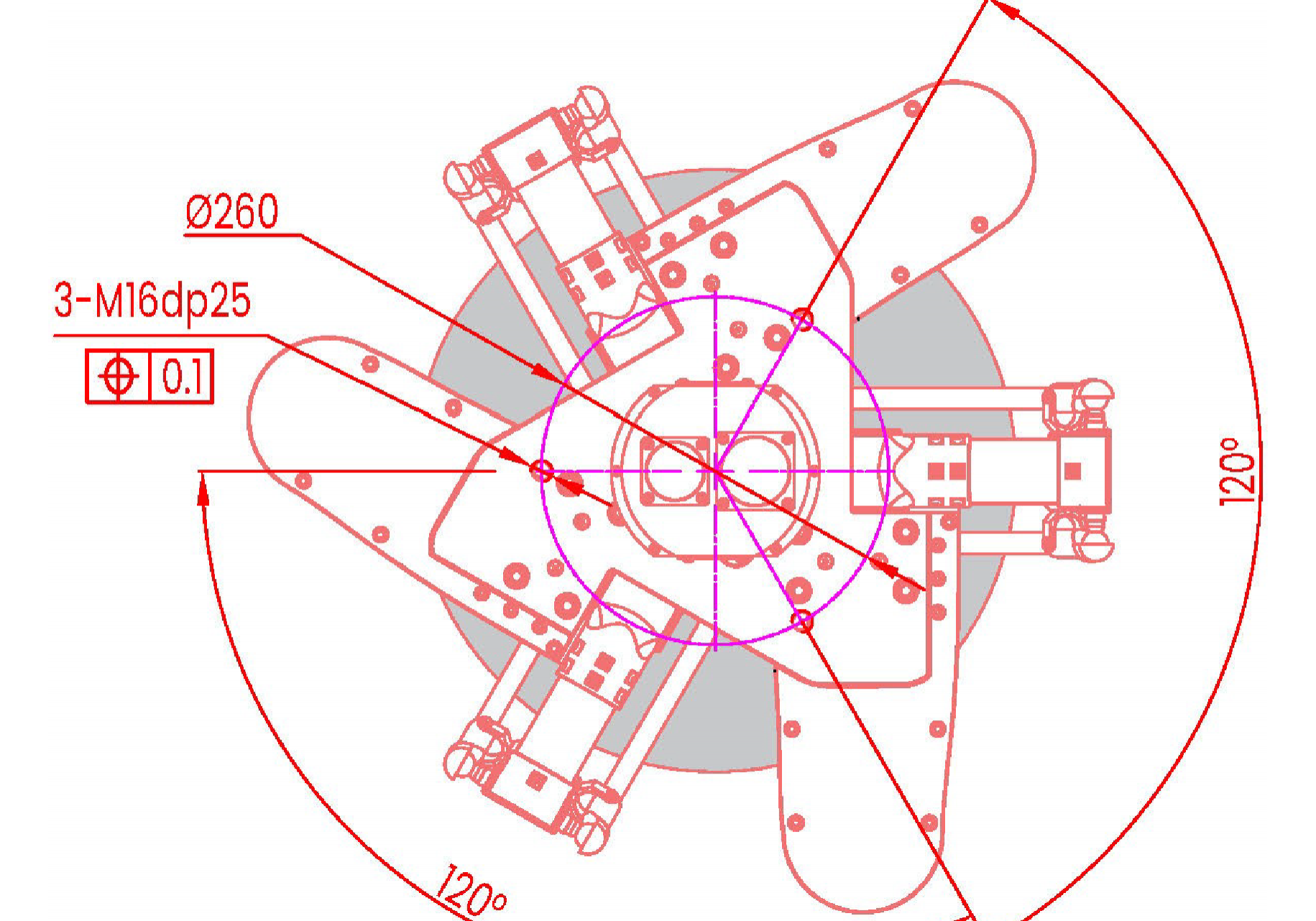
03.Sazkirina bingehîn (mm)
Peyama xwe li vir binivîse û ji me re bişîne