


D3PM-1800-P15 Delta Robot
Taybetmendiya hilberê
Taybetî
1、Dema çerxa standard ji 0.6s kêmtir e, ji bo leza bilind û hêjahiya hindiktirîn bi peydakirina we re hevdîtin pêk tîne.
2, Sêwirana pêşkeftî ya motora zivirî ya li ser plat-forma tevgerê, dihêle ku robot bi hêsanî bigihîje rastbûna zivirîna bilind.
3、Robot ji bo operasyonên cîhê teng, û hem jî di warê 3C de leza bilind û rastbûna îdeal e.Bi berfirehî di komkirin, hilgirtin û ceribandina perçeyên xebata piçûk de tê bikar anîn.
Parametreyên Hilberê
| Awa | D3PM-1800-P15 | |
| Axes | 3+1 | |
| Payload | 15 kg | |
| Manîpulator | Pîvan | 134 kg |
| Çap | 1800mm | |
| Repeatability | Rewş | 0.05mm |
| Rotation | 0,025° | |
| Max Speed | 260pp/min | |
| Range Rotation | ±360 | |
| Momenta herî zêde ya bêkêmasî ya destûrdar | 0.224kg .m2 | |
| Angle Range of Actuated Arm | Bi jorve | 23.5º |
| Jêr | 71.5º | |
| Navê min | Sê-qonaxa 380VAC -10%~+10%, 49~61HZ | |
| Kapasîteya hêzê | 10KVA | |
| Hêza Nirxkirî | 6.2 kw | |
| Germahiya Storage | -10℃~70℃ | |
| Jîngeha Xebatê | -10℃~50℃,RH≤80% | |
| Parastinî | IP55 | |
Drawing Product
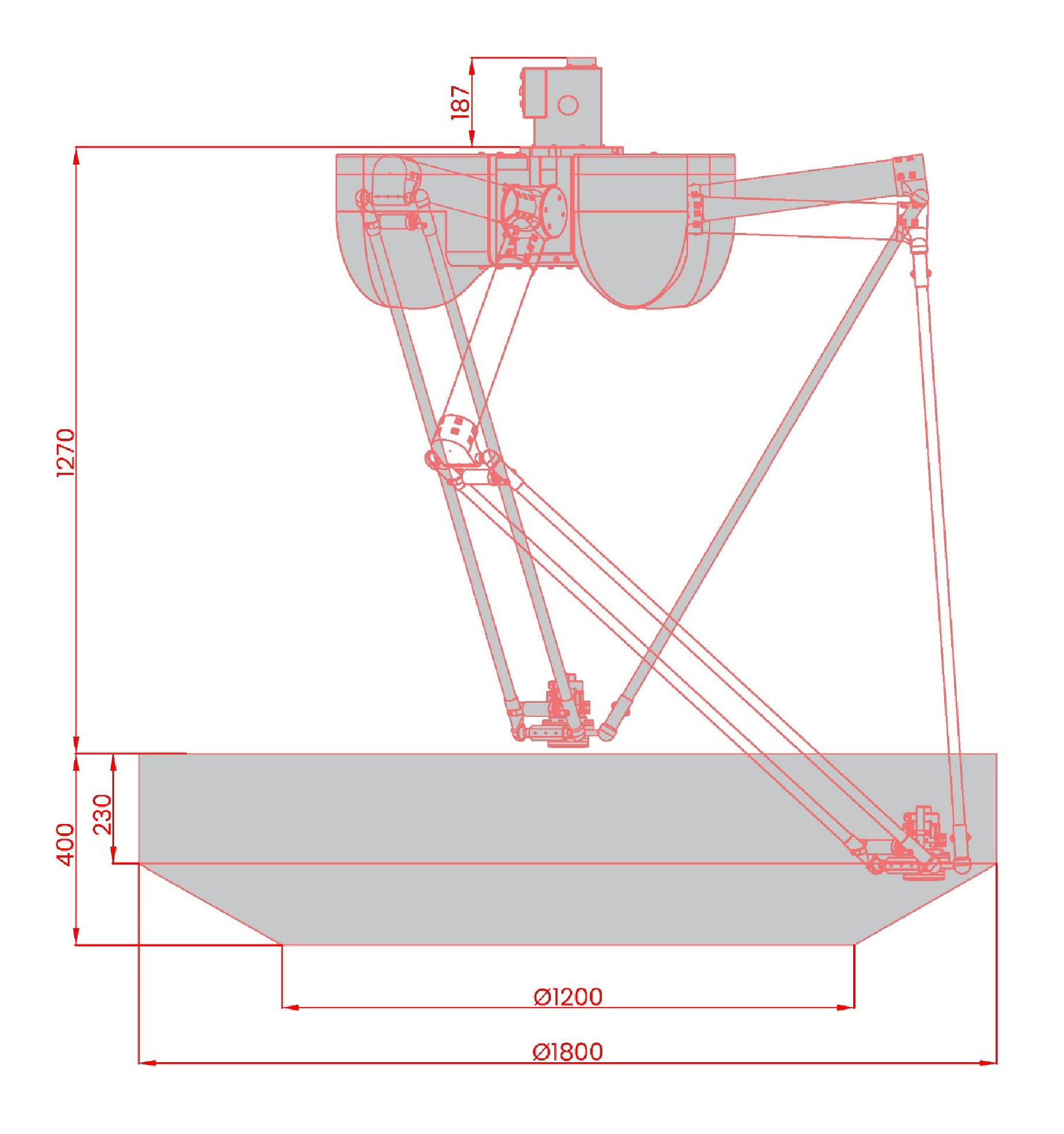
01. Pîvan û Rêjeya Xebatê (mm)
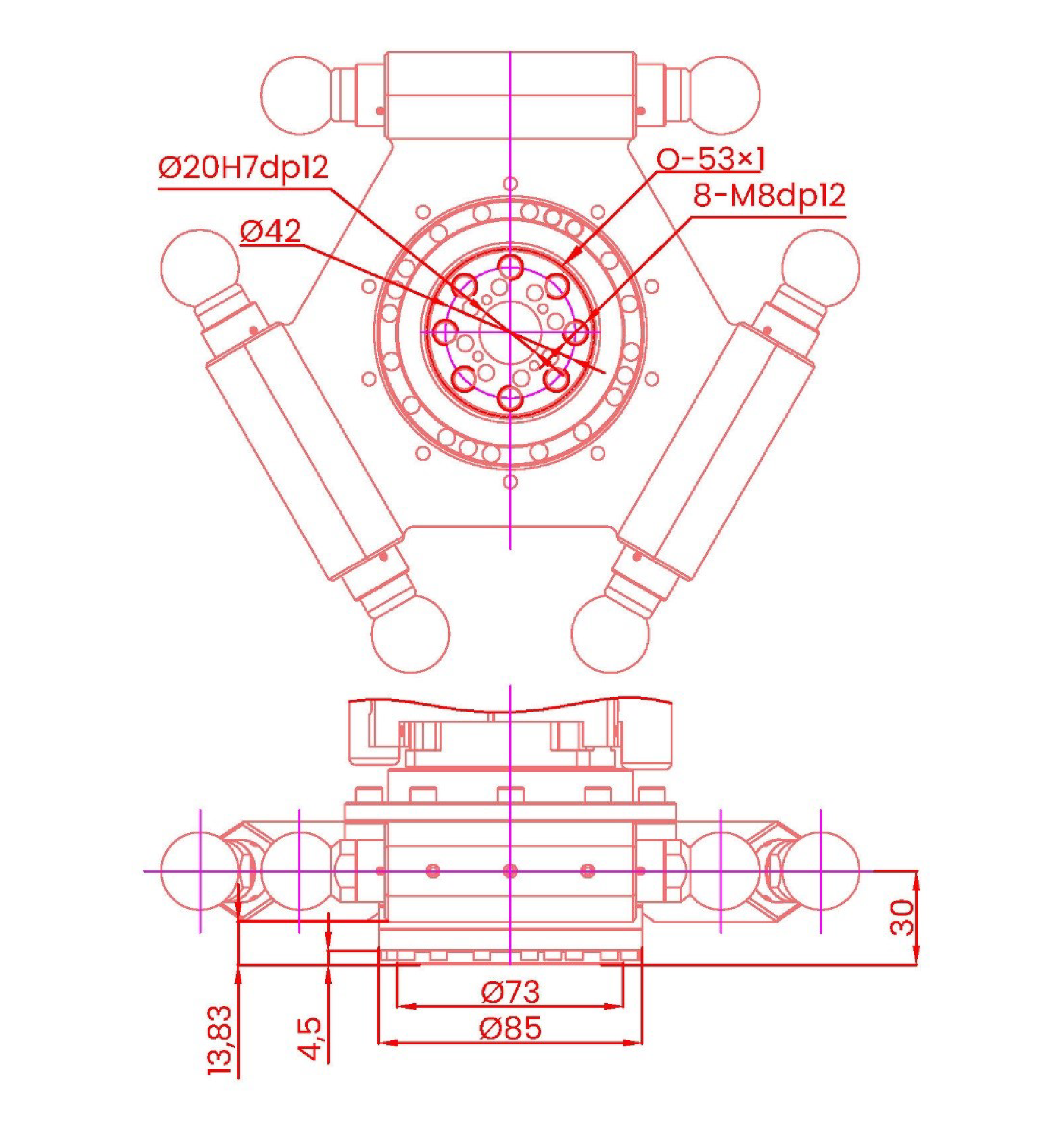
02. Flange (mm)
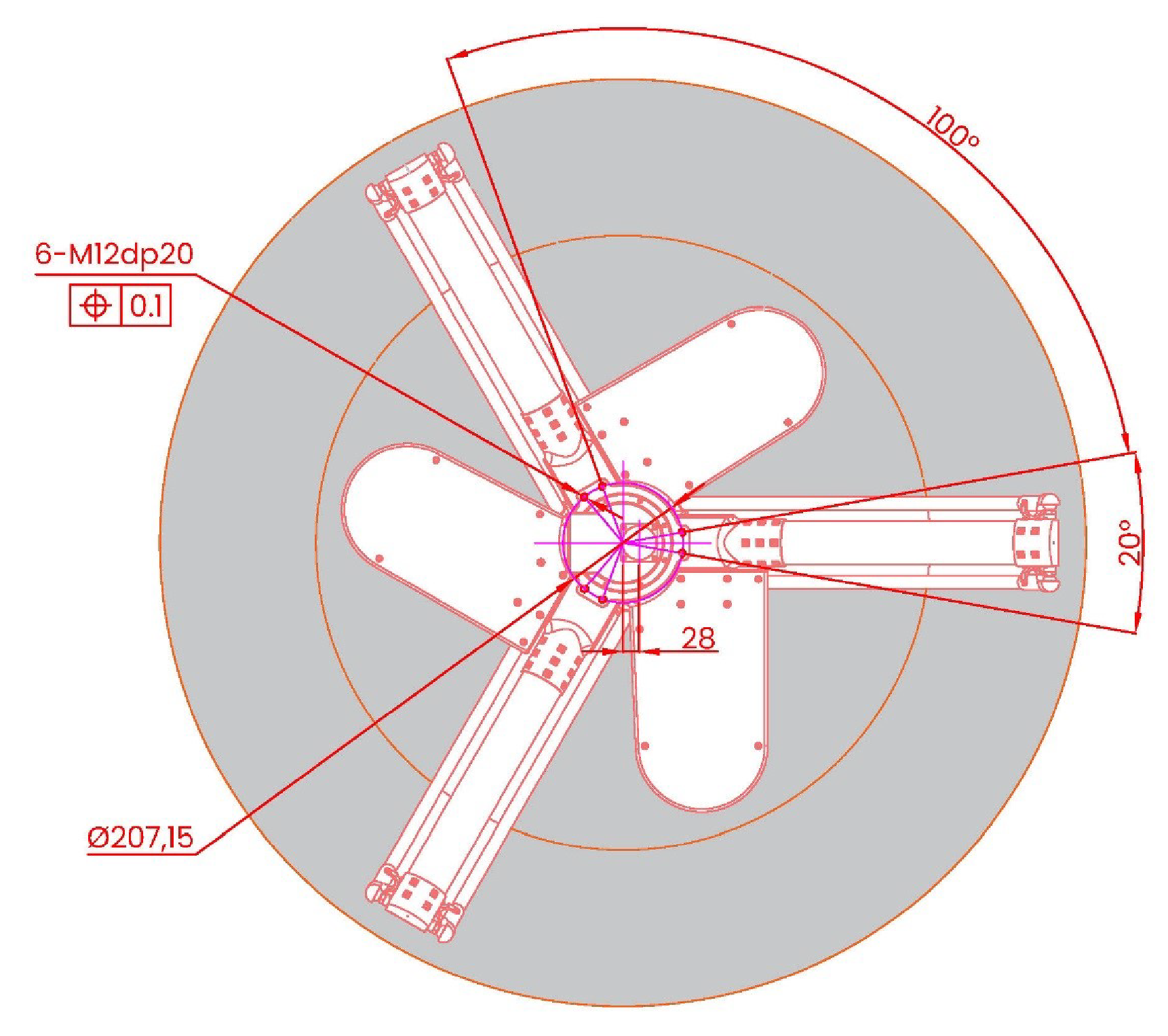
03.Sazkirina bingehîn (mm)
Peyama xwe li vir binivîse û ji me re bişîne





